
2 février.
DOSSIER TECHNIQUE
Volet/aérofrein ventral pour Jojo (partie 4)
Rappel des épisodes précédents.
La première partie de ce dossier, assez généraliste, nous a permis d'exposer le projet dans son bien-fondé pour adapter un peu plus le SPEEDJOJO au cahier des charges que nous nous sommes fixé, à savoir, voler vite et avoir la meilleure capacité montagne possible. Les choix technologiques ont été évoqués, principalement dictés par les contraintes liées à la configuration existantes.

La troisième partie nous a permis de sortir des chiffres, de traînée et d'efforts. Des équations théoriques simples liant vitesse, braquage de spoiler, trainée et efforts sur la structure ont pu être déterminées.
But de cet épisode.

En fonction de la position du vérin, le modèle devra calculer le braquage du volet/spoiler, la traînée obtenue (ainsi que l'influence sur la pente avion), les efforts sur la gouverne, la charnière et cela pour toute la plage de vitesse de l'avion.
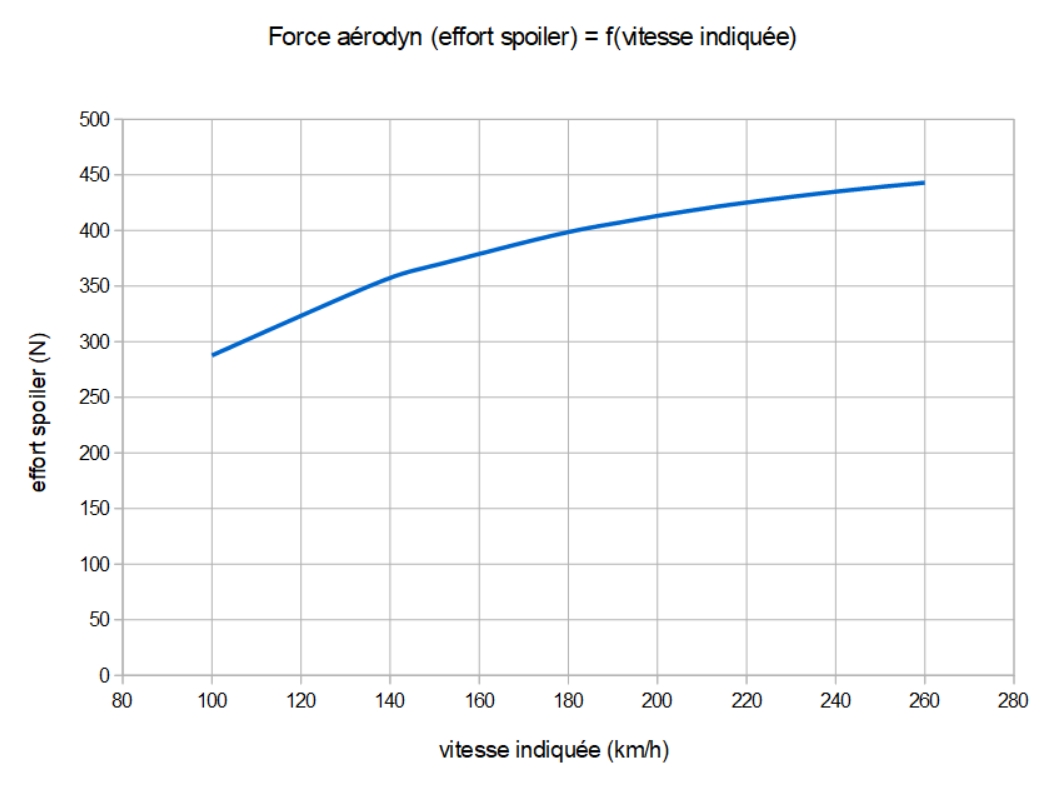
Nous présenterons également ces résultats sous la forme de courbes, avec en abscisse la vitesse indiquée et en ordonnée toutes les grandeurs précédentes.
Pour cet exercice, nous utiliserons l'application gratuite OpenOffice Calc, la version low cost d'Excel.
Le but final est de pouvoir effectuer des simulations pour optimiser l'efficacité du spoiler tout en maintenant des efforts raisonnables permettant de construire léger. Nous serons donc amenés à faire des compromis.
Schéma du modèle.
Un bon dessin valant mieux qu'une explication confuse, voici un schéma de principe du dispositif.
Le fuselage est la partie en vert, le bleu représente l'écoulement extérieur. Le spoiler (en jaune) est déployé avec l'angle de braquage ß.
e est la corde du volet/spoiler.
Le point d'application de la force aérodynamique F est situé à 44% de la corde du spoiler et s'exerce perpendiculairement à ce dernier (voir partie 3 de ce dossier).

h est la distance entre la charnière et le point d'action du câble de la commande. Un secteur de 90° « en dur » est fixé au spoiler qui permet un écart h constant entre le câble et la charnière.
Le vérin électrique est représenté plutôt comme un vérin hydraulique pour la compréhension, avec d la course totale et x la valeur commandée.
Le ressort hélicoïdal a une longueur au repos Lo et une longueur L en charge. Nous utiliserons ensuite ΔL = L-Lo. k est la raideur du ressort en N/m.
Fx est la traînée, c'est la composante horizontale de F.
Fr est la force exercée sur le câble de commande.
Fa est la force exercée sur le spoiler par le câble, de même intensité que Fr, mais avec une orientation différente.
Fc est la somme vectorielle de Fr et F ; c'est la force exercée par le spoiler sur la charnière. L'angle α donne l'inclinaison de Fc par rapport à la verticale.
Nous allons maintenant pouvoir mettre en équations les différentes forces et leurs équilibres, chose que je vais faire sur papier (pour ceux qui veulent vérifier), car je n'ai pas d'éditeur pour formules mathématiques et j'ai la flemme d'en trouver un. Ça sera donc des photos.
Équilibre des forces câble/forces aérodynamiques.
Voici le système de trois équations qui permet de trouver la position d'équilibre du spoiler, c'est à dire son braquage en fonction de la position vérin, des caractéristiques du ressort et de la vitesse.
La première, notée 1, est l'équation classique de la relation aérodynamique qui lie la force F qui agit sur le spoiler à son coefficient aérodynamique C. L'expression de C en fonction du braquage est rappelée en première ligne (voir ce dossier en partie 3).
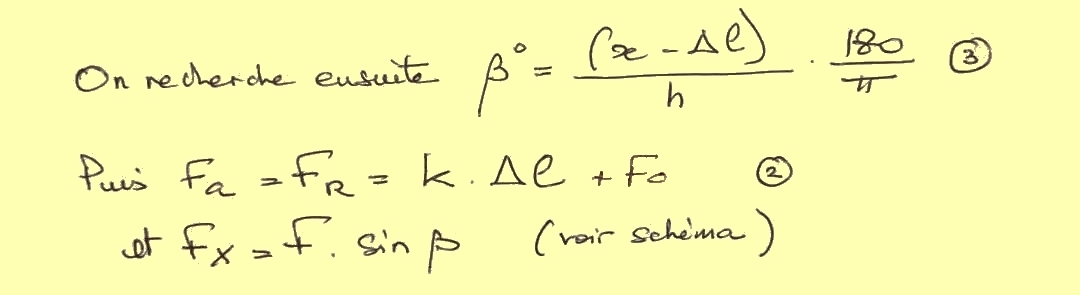
La deuxième équation, notée 2, relie cette même force F à la force appliquée sur le ressort Fa (caractérisé par sa raideur et son allongement). La force Fo est la force initiale qu'il faut appliquer au ressort hélicoïdal pour décoller les spires jointives (certains ressorts sont ainsi pré-contraints). Le coefficient a, rapport de longueurs, exprime le décalage possible entre le point d'application de la force du câble et le point d'application de la résultante aérodynamique sur le spoiler. Par exemple sur le schéma, a˂1.
- La
troisième, notée 3, détermine le braquage en fonction de la
longueur de la chaine de commande, dans laquelle intervient la
position du vérin x et l'allongement du
ressort ΔL. Le facteur de conversion 180/π
permet d'exprimer ß
en degrés au lieu de radians.

La résolution de ce système d'équations doit nous permettre de trouver ΔL, puis ß ainsi que l'ensemble des forces, en paramétrant les caractéristiques du ressort, du vérin et la vitesse.

-
La dernière égalité commence à être un peu chargée. Tâchons de la simplifier en regroupant les constantes et en ayant en tête que la variable est ΔL.
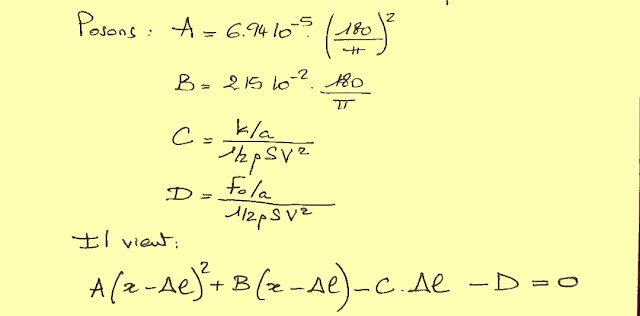
Voici une expression plus facile à manipuler.
Maintenant, développons de manière à écrire un polynôme dont la variable est ΔL, puis une nouvelle fois, simplifions cette équation sur la dernière ligne, en attribuant à chacune des constantes un nouveau nom.

Cette façon de procéder par simplifications, avec des constantes intermédiaires, permet d'éviter des erreurs de recopie et est parfaitement adaptée pour l'utilisation dans un tableur Excel. Ces valeurs A, B, C, D, A', B', C' pourrons ensuite être invisibilisées sur la feuille de calcul une fois le tableur bien au point.
Nous sommes donc maintenant face à la résolution d'une équation polynôme du second degré de variable ΔL (niveau terminale).

La résolution mathématique donne deux solutions, mais quand il s'agit de physique, il n'y en a souvent qu'une de bonne, car le système réel est borné par des butées. Heureusement, comme ici, il suffit d'essayer pour facilement éliminer la mauvaise solution complètement incohérente.

Il ne nous reste plus qu'à rechercher l'effort sur la charnière, qui est la somme vectorielle des deux autres forces qui s'appliquent au spoiler, F et Fr.

Réalisation du tableur.
Mettons maintenant les mains dans le cambouis numérique.
On commence par l'interface utilisateur avec une série de cases jaunes que l'on pourra modifier à notre guise pour les différentes simulations.

Quelques commentaires sur ces 11 premières lignes :








Ligne 1, Titre du document
Ligne 2, la masse avion, puisqu'elle intervient dans l'accroissement de la pente pour la même traînée.
Ligne 3, la surface du volet/spoiler, à peu près figée pour nous à 0,28 m².
Ligne 4, la corde du spoiler, qui sera utile pour calculer le point d'application de la force aérodynamique à 44% de cette corde.
Ligne 5, distance charnière/point d'accroche du câble de commande. Son choix permettra de s'adapter aux différentes contraintes (efforts structure, dimensions standard de vérin et choix du ressort).
Ligne 6, raideur du ressort, dont il faudra astucieusement déterminer la valeur pour limiter les efforts à grande vitesse.
Ligne 7, longueur du ressort au repos qui permettra de calculer l'allongement relatif du ressort et contrôler qu'on ne dépasse pas ses limitations physique (rester dans le domaine élastique).
Ligne 8, force initiale permettant de décoller les spires (jointives au repos) avant que la loi qui lit l'allongement à la force en traction ne s'applique (rapport k). Je l'ai appris récemment, mais cette caractéristique est courante pour ce type de ressort, c'est à dire qu'ils sont en général pré-contraints.
Ligne 9, course totale du vérin. Elle n'intervient pas dans les calculs, elle est indiqué pour mémoire et ne limite pas la course x de la ligne 9.
ligne 10, course du vérin X, c'est à dire la consigne envoyée par le pilote.
Ligne 11, vitesse indiquée, de 100 km/h (vitesse mini d'approche) à 260 km/h (VNE = 270 km/h). Il n'est pas prévu de modifier les grandeurs de cette ligne, mais ça doit être possible.

Ligne 12, conversion de la vitesse en m/s pour les besoins de calculs.
Ligne 13, calcul de a, rapport de longueurs a = e.44% / h
lignes 14 à 20, variables intermédiaires décrites au paragraphe précédent.
Ligne 21, ΔL, allongement absolu du ressort sous charge. C'est la solution de l'équation du second degré décrite au chapitre précédent.
Ligne 22, élongation du ressort ΔL/Lo, permet de contrôler que nous restons dans le domaine élastique du ressort.
Ligne 23, braquage du spoiler ß en °, résultat de l'équation 3.
Ligne 24, force aérodynamique F qui s'applique perpendiculairement au plan du spoiler.
Ligne 25, force de traction Fa sur le câble.
Ligne 26, traînée Fx, composante horizontale de F.
Ligne 27, composante horizontale de Fc (la force qui s'applique à la charnière).
Ligne 28, composante verticale de Fc.
Ligne 29, effet sur le plan avion en %.
Vue d'ensemble du tableur.


J'ai ajouté sur le tableur le schéma de l'équilibre des forces, pour pouvoir retrouver facilement toutes les grandeurs.
Sur le côté droit, nous avons les courbes des grandeurs qui nous intéressent plus particulièrement. Sur cet exemple, choisi pour être démonstratif, voici comment peuvent évoluer les 5 variables dont le fond coloré correspond à la couleur des courbes :

Sur cet exemple, le braquage évolue de 80° à la vitesse de 100 km/h, à 22° à la vitesse de 260 km/h, montrant bien que l'on peut obtenir un effacement progressif du spoiler quand la vitesse est croissante.


Récapitulons.
Dans cet épisode nous avons traduit en équations l'équilibre des différentes forces du système aérofrein puis, réalisé l'outil de calcul permettant d'afficher l'évolution de toutes les grandeurs utiles en balayant l'ensemble de la plage de vitesse.
Nous pouvons maintenant manipuler l'outil en faisant varier la raideur du ressort, la course du vérin, ainsi que le point d'ancrage du câble sur le spoiler.
La prochaine partie nous permettra, je l'espère, de trouver un compromis entre le cahier des charges, les efforts considérés comme admissibles et la nécessaire adaptation aux équipements disponibles dans le commerce (ressorts, vérins).
L'outil pourra évidemment évoluer si le besoin s'en fait sentir.
Dernière chose, le secteur qui maintient le câble à distance constante de la charnière est pour l'instant un arc de cercle. On peut imaginer un secteur à rayon variable, ce qui constitue une possibilité supplémentaire d'adaptation si besoin.
Merci de votre attention.
Tableur disponible ici et dans l'onglet documentation de ce blog.
6 février.
Modèle moteur/hélice (O-200/Ratier).
J'avance tranquillement l'élaboration de mon modèle numérique du SPEEDJOJO. Je ne pense pas rentrer trop dans le détail dans ce blog, car nos résultats ne valent que pour nous-mêmes. Mais il est des résultats qui peuvent intéresser ceux qui voudraient se lancer dans la même démarche, ou simplement pour la culture. Je suis personnellement en train d'apprendre beaucoup de choses comme vous allez le voir.

Jusqu'à présent, j'avais constaté que le régime moteur plein gaz en montée était une fonction sensiblement affine de la vitesse indiquée avec un changement de pente vers 150/160 km/h. J'ai attribué un peu rapidement certains écarts d'un jour à l'autre à une certaine dispersion naturelle liée à la précision de mesure ou écarts de réglage de richesse. Quand on fait un modèle, on espère ce genre de simplifications bien pratiques. Mais à y regarder de plus prêt, les choses ne sont pas aussi simples.
Nos récentes mesures filmées d'accélérations en palier m'ont permis d'établir une correspondance fine du régime et de la vitesse indiquée.
Voici une synthèse de nos mesures et tachons de les interpréter.
D'abord nous constatons une rupture de pente vers 160 km/h en basses couches. C'est moins net en altitude. J'interprète ce changement de pente au fonctionnement de l'hélice, qui, pour une IAS inférieure à 160 km/h, est en partie décrochée. La zone "décrochée" diminue progressivement avec la vitesse car l'incidence de l'hélice diminue. L'hélice charge donc progressivement le moteur en compensant partiellement l'effet de décharge lié à la vitesse. A basse altitude, on obtient pratiquement un effet "constant speed", qui explique au passage cet effet revendiqué par certains fabricants d'hélices pour leurs hélices à pas fixe. La partie décrochée d'une hélice offre moins de couple résistant que lorsqu'elle est accrochée. Je ferai un petit dossier pour l'expliquer, car ça n'a rien d'évident. Dans notre cas, qui peut évidemment être différent pour un autre couple moteur/hélice, l'hélice est complètement "accrochée" vers 160 km/h. Au-delà, le couple résistant de l'hélice diminue plus fortement quand la vitesse augmente, puisqu'il n'existe plus cette compensation progressive par l'augmentation de surface accrochée.
Il existe donc deux régimes de fonctionnement de l'hélice, une où elle est partiellement accrochée et une autre où elle est entièrement accrochée. On peut donc théoriquement, en jouant sur le calage et la géométrie hélice, s'arranger pour que cette transition ait lieu proche de la vitesse de croisière et revendiquer comme "constant speed" une hélice à pas fixe.
Le rendement de l'hélice partiellement décrochée est moins bon, car on ne peut plus parler de disque hélice de propulsion, puisque c'est l'extrémité des pales d'hélices qui exercent la traction. La traction est obtenue plutôt à travers un tube de propulsion plus ou moins épais. On comprend ainsi pourquoi le rendement est moins bon. Mais alors pourquoi une hélice comme E-props sait les faire, développe une si bonne traction et génère des perfos décollage exceptionnelles ? Tout simplement parce que le couple résistant hélice est nettement plus faible à la même vitesse, avec une importante partie décrochée permettant au moteur de tourner plus vite et de produire plus de puissance. Au final, même si le rendement hélice est moins bon, la traction utile permise par cette augmentation de puissance est largement plus importante.
L'effet constant speed est plus facile à obtenir avec des cordes étroites, plus sensibles aux variations d'incidence, comme pour une aile de planeur à fort allongement pour laquelle le coefficient qui lie l'incidence au Cz est le plus important (environ 0.1 point de Cz par degré d'incidence).
Pourquoi cette rupture de pente est moins nette en altitude et semble se décaler vers des vitesses plus basses ? Tout d'abord, ces courbes, je les ai un peu filtrées avec le nuage de points que j'avais et je les ai traduites en équations simples, en linéarisant ce qui pouvait l'être, et avec des équations du second degré pour les parties courbes (paraboles). La précision est tout à fait honnête. Il y a notamment assez peu de dispersion dans le nuage de points.
Vous avez remarqué que l'axe horizontal est gradué en IAS (vitesse indiquée), or en altitude, la vitesse réelle est plus importante pour la même IAS, ce qui a un pour effet de diminuer l'incidence hélice est donc de décaler le point de changement de régime vers les basses vitesses indiquées.

Si on reconstruit les courbes avec la TAS en abscisse, elles ne se coupent plus et on obtient quelque chose de plus parlant. Pour une vitesse vraie donnée, le régime diminue avec l'altitude, traduisant la baisse de puissance du moteur.
J'ai ajouté en marron les limites de régime moteur. La ligne horizontale est la limite de 2750 tpm que le pilote doit respecter activement (en réduisant) jusqu'au FL75 (le pas hélice est réglé pour cela). Au-dessus du FL75, la manette de gaz est au tableau, et c'est la faible densité de l'air qui limite le régime. Au FL85, plein gaz mixturé, le régime tombe à 2660 tpm représenté par la droite oblique marron. Le régime moteur est cette fois-ci subit.
Dernière chose, et pas des moindres, nous nous apercevons que la vitesse maximum est atteinte au FL75 plein gaz, et non au niveau de la mer.
Je vais donc tenter l'autocritique constructive, car j'ai longtemps cru que la vitesse maximum s'obtenait en basses couches, c'était d'ailleurs démontré par nos mesures. A bien y réfléchir, nous avions souvent quelques tours de plus que les 2750 tpm, or ces courbes montrent à quel point ce paramètre est sensible. Beaucoup plus difficile de tricher en altitude car nous sommes naturellement proche du maxi. Putain de facteur humain !
Faute avouée est à moitié pardonnée et j'espère que vous prendrez en compte cet acte de contrition. Mais faisons le point:
Maintenant que nous sommes richement équipés de moyens de mesures divers et variés, j'ai remarqué que nos badins étaient pessimistes de 3 km/h à grande vitesse, et cela à deux reprises. Je ne sais si l'instrument aiguille qui est notre référence (car il a moins d'inertie que l'instrument électronique) s'est déréglé, mais nous allons tirer ça au clair par un vol de contrôle dédié prochainement. Bref, si l'on reprend la TAS max du tableau précédent de 236 km/h, nous aurions plutôt 239.5 et donc 129.3kt. Donc je vous ai menti, mais pas autant qu'Olivier Veran !
Rappel pression statique de bord.
J'en profite pour vous redire le moyen de vérifier facilement votre pression statique de bord qui alimente l'altimètre, le variomètre, le transpondeur et le Badin.
Lorsque vous décollerez la prochaine fois sur un terrain horizontal, observez (ou faites observer) le variomètre, qui ne doit pas bouger jusqu'à la rotation incluse. En effet, la vitesse ne doit pas influencer la pression statique qui ne serait plus statique. J'inclus la phase de rotation avant que l'altitude n'augmente pour contrôler également l'effet de la mise en incidence de l'avion, qui doit lui aussi être neutre. On peut ensuite, en cas de problème, comme sur notre avion il y a quelques années, tenter de corriger ce défaut. Nous avions fait un post dans ce blog sur le sujet.
9 février.
Suite de l'article précédent.
Le sujet concernant la vitesse maxi obtenue par le modèle me hante littéralement et j'aimerais vous faire part de mes réflexions.
Je me suis peut-être excusé un peu vite en exploitant mon modèle qui a ses limites. Le modèle considère que la manette de gaz est à fond, et je ne peux simuler la réduction au maxi RPM de 2750 tpm lorsqu'il est atteint, car cela suppose un programme itératif de recherche d'équilibre qu'un simple tableur ne me permet pas de faire. Le modèle moteur/hélice dont je dispose ne me permet pas de prendre en compte autant de paramètres simultanément. Le régime moteur est le résultat complexe d'un ensemble de grandeurs que sont: la vitesse, l'altitude, la température, la pression d'admission. Mon modèle ne prend en compte que les trois premières, la pression d'admission n'est pas "réglable", le moteur étant plein pot elle est considérée proche de la pression extérieure.
Prenons un exemple de la problématique que je souhaite vous exposer.
Imaginons un palier d'accélération au FL55 plein gaz. Le modèle prédit (et c'est la réalité) que le régime maxi moteur sera atteint à la vitesse indiquée de 215 km/h, soit 233 km/h de vitesse vraie (126 kt), ce qui est inférieur à nos mesures supposément un peu vite caviardées. Le problème vient du fait que ce point (215 km/h; 2750 tpm) ne correspond pas à une condition d'équilibre, car à l'instant précis de ce passage, l'avion accélère encore. Le pilote réduit alors activement les gaz pour maintenir le régime moteur, ce qui a pour effet de diminuer la puissance et donc la traction hélice. On voit bien que l'équilibre sera atteint à une vitesse supérieure à 215 km/h, mais il m'est impossible de la connaitre précisément pour l'instant. A contrario, au FL75, la vitesse maxi est atteinte plein gaz et au régime maxi, nous avions d'ailleurs réglé par tâtonnement le pas hélice pour obtenir cette conjonction. Il est donc abusif de conclure trop rapidement que la vitesse max serait atteinte au FL75.
Je peux donc, dans un premier temps, réhabiliter les précédents records en basses couches et tacher de documenter un peu plus cet excédent de vitesse acquis à partir du début de réduction des gaz. Une seule chose est sure, c'est que dans l'état actuel des choses (trainée avion, réglage hélice actuel), la vitesse max ne peut être atteinte qu'avec un régime de 2750 tpm, c'est à dire en dessous du FL75. On voit sur la dernière courbe que le régime d'équilibre de 2660 tpm au FL85 fait reculer la TAS à 220 km/h.
Ce qu'il y a de bien avec les modèles, c'est qu'ils permettent de faire des simulations. J'ai donc recherché, pour le même calage hélice, de combien il faudrait diminuer la trainée et à quelle altitude serait atteint le Graal de 135 kt. En diminuant la trainée, cela permet d'obtenir l'équilibre de vitesse au régime max à une altitude supérieure au FL75. En extrapolant outrageusement mes mesures, je trouve un point d'équilibre au FL120 à condition de diminuer le Cx propre de 8 %. Cela semble hors d'atteinte, mais comme nous l'avons pressenti, le record se situerai plutôt à une altitude où nous sommes obligé de réduire les gaz et pour un gain de trainée moins ambitieux.

Cliquez sur l'image.
Disponible également dans l'onglet documentation.
12 février.
Des nouvelles de l'administration pour notre CNRA.

Bon, après contact téléphonique, il semble que nous ne soyons pas obligés de voler 4 heures d'affilée. Notre vol d'hier sera le vol de cet "essai majeur".
Hélice calée.
Oui, car qu'hier matin nous avons fait 1h10 de vol pour conduire de nouveaux essais. La météo est parfaite en ce moment, avec grand beau temps et masse d'air particulièrement stable. Un de ces essais a été mené pour mesurer l'effet d'une hélice calée sur la finesse. Ça peut paraitre un peu gonflé d'arrêter le moteur en vol, quoique cela se pratique couramment sur ULM, alors nous avons pris quelques précautions. D'abord notre moteur démarre très bien quand il n'est pas trop froid, il n'est pas capricieux comme peuvent l'être certains gros moteurs à injection. Ensuite nous sommes montés à 8000 ft au-dessus de Cipières (3800 ft) pour pouvoir finir en encadrement en cas de malheur. Le père n'a pas sourcillé quand je lui ai demandé de faire cet essai, je pense même qu'il y a pris du plaisir. Bref, une fois en place, réduction des gaz, réchauffe carbu et mixture sur étouffoir.
Ce qui surprend en premier, c'est le silence. Ensuite, comme l'hélice tourne encore, il faut ralentir, jusqu'à 90 km/h avec l'alarme décrochage qui gueule, puis elle s'arrête après quelques tremblements réprobateurs du moteur. Puis on peut tranquillement laisser augmenter la vitesse vers 135 km/h et mesurer des tranches d'altitude au chrono. Mon enregistreur FlySight était bien entendu de la partie avec une mesure sur une tranche généreuse de 1500 ft.
Le résultat m'a un peu surpris, la finesse obtenue est de 12.4, c'est à dire 1.5 point de finesse en moins que la finesse moteur au ralenti qui est de 14 (finesse max). Il faut donc en conclure que, moteur au ralenti, nous sommes plus près de la transparence hélice. Nous ne pouvons malheureusement pas placer l'hélice en drapeau pour connaitre ce que je recherche, c'est à dire la finesse de la seule cellule.
Nous pourrons éventuellement compléter ces essais d'une mesure de la finesse avec moteur arrêté, mais hélice tournante, pour laquelle nous allons sûrement constater une dégradation supplémentaire de la finesse.
Je repense à un gars qui avait équipé le moteur de son Sonex avec un contacteur électrique chargé d'indiquer le faible déplacement longitudinal du vilebrequin moteur. Il pouvait ainsi savoir, grâce au jeu du vilebrequin sur ses paliers, quand l'hélice passait de traction à frein. Le système alimentait une LED et quand elle clignotait, c'est qu'il avait atteint la transparence hélice.
Je vais en parler au père pour voir si nous pourrions faire de même.
Triangle du Colonel Renard.
Qui consiste, pour étalonner la vitesse indiquée, à réaliser un triangle équilatéral à vitesse indiquée constante pendant lequel on relève la route (TRK) et la vitesse sol (GS) de chaque branche. Quelques calculs trigonométriques plus tard, on obtient la vitesse air (TAS) qui correspond à la vitesse indiquée choisie et accessoirement le vent subi pendant la manipe.
Page de calcul disponible ici

C'est donc l'essai que nous avons conduit en baie de Fréjus au-dessus de la mer, et comme le QNH était bien joufflu à 1035, nous avons volé à 0 ft calé 1013 pour limiter au maximum les corrections d'altitude. La température n'était pas standard, le thermomètre indiquant 9°C, sinon c'était parfait.
Nous avons bien repéré le déficit de vitesse de l'Xtrem que nous suspections et avons promptement réagi pour corriger ce défaut une fois au sol. Pour tenter de faire indiquer la même chose aux deux badins, j'utilise un tuyau de silicone branché au Pitot, dans lequel je peux souffler en étant assis dans l'avion, face aux instruments. Avec un peu d'entrainement ça marche très bien et on peut bloquer la pression en coudant le tuyau et opérer de fines variations en le comprimant à la main. Les deux Badins étant de technologies différentes, l'un est mécanique, l'autre électronique, il est en pratique impossible de faire correspondre les vitesses sur toute la plage. La correction sur l'Xtrem s'effectue en pourcentage de la valeur affichée alors que pour le Badin aiguille on ne peut que déplacer le zéro.
J'ai donc choisi les réglages en fonction des besoins et fait en sorte que les instruments soient d'accord dans la plage haute vitesse pour les mesures de perfos. Dans la plage basse vitesse, le badin aiguille est pessimiste jusqu'à 7 km/h, mais je n'ai au final pas modifié son réglage d'avant, donc je sais où doit être l'aiguille en approche, je n'ai pas besoin de savoir si c'est précis. J'ai d'ailleurs conservé ce Badin aiguille pour sa lisibilité en toutes circonstances et sa très faible inertie, contrairement à l'Xtrem qui a du retard en phases dynamiques et parfois difficile à lire en plein soleil.
Pour nos archives, voici la correspondance fine établie, tuyau à la bouche, des deux instruments:
|
biglo |
Xtrem 121% |
|
50 |
57 |
|
60 |
67 |
|
70 |
75 |
|
80 |
86 |
|
90 |
94 |
|
100 |
104 |
|
110 |
114 |
|
120 |
123 |
|
130 |
133 |
|
140 |
143 |
|
150 |
152 |
|
160 |
162 |
|
170 |
172 |
|
180 |
181 |
|
190 |
191 |
|
200 |
201 |
|
210 |
210 |
|
220 |
220 |
|
230 |
230 |
|
240 |
241 |
|
250 |
251 |
Trainée de refroidissement, volet de capot.
J'avoue que j'aurais dû faire ces mesures depuis longtemps, puis j'ai un peu oublié, les conditions sont rarement parfaites pour mettre en évidence un effet souvent noyé dans le bruit. Les conditions météo étant particulièrement propices, nous avons fait deux mesures de vitesse maxi au FL75, très stables, pour tenter de mesurer l'influence sur la vitesse du volet de capot. Et bien il y a une nette différence !
La première mesure avec volet ouvert nous a permis d'atteindre 209 km/h indiqués, plein gaz mixturé et 2750 tpm. FF: 30 L/h. La TAS calculée est de 235.4 km/h (127.1 kt)
La deuxième mesure avec volet fermé, là je suis obligé de réduire un peu car les 2750 tpm sont dépassés. On trouve un équilibre à 2750 tpm, IAS 212 et FF 27 L/h. TAS 238.3 km/h (128.7 kt)
Donc l'influence du volet de capot, et donc de la trainée de refroidissement est sensible, avec une amélioration de 3 km/h malgré la réduction devenue nécessaire. Le FF baisse de 30 à 27 L/h, c'est donc une diminution de conso horaire Ch de 10%, alors que la conso distance Cd diminue de 12.74 L/100km à 11.33 L/100km, soit -11% !
14 février.
Essais en vol.
Petit vol du matin avec le père en cette journée de St Valentin.
Le temps est merveilleux pour effectuer des mesures précises, alors nous en profitons.
Alarme décrochage.

Effet volet de capot sur les perfos.
Notre vol précédent avait montré un effet assez net sur la vitesse et la consommation, mais je voulais mettre en évidence l'effet sur la vitesse seule, sans être limité par le régime moteur. Il fallait donc monter un peu plus haut que le FL75. Nous sommes donc montés au FL80 pour ces essais. Les résultats sont particulièrement précis, grâce à la stabilité de la masse d'air actuelle. Je rappelle les conditions de l'essai qui sont très simples, c'est plein pot avec moteur mixturé. On ne retouche pas les réglages de richesse entre les deux essais.
Premier leg avec le volet ouvert, régime 2720 tpm, IAS 204, FF 26 L/h 4°C TAS 232.2 (125.4 kt)
Deuxième leg, volet fermé, régime 2760 tpm, IAS 209, FF 26 L/h 4°C TAS 237.9 (128.5 kt)
A la fin du deuxième leg et pour confirmation, j'ai ouvert le volet et nous avons retrouvé le point d'équilibre du leg 1. Donc c'est béton !

Bref, le volet de capot fermé nous donne dans ces conditions presque 6 km/h de plus. Après tout le mal qu'on s'est donné c'est bien mérité !
Finesse moteur mort.
Comme nous étions à 8000 ft sur Cipières, nous avons fait une nouvelle mesure de finesse au chrono, moteur coupé. Il ne faudrait pas que ça devienne une habitude :o)
A une différence près, quand même, puisque nous avons laissé tourner l'hélice. Le résultat est une fois de plus surprenant, puisque cette finesse à 135 km/h IAS s’établit à 13. Il semble donc que laisser tourner l'hélice traine un tout petit peu moins que l'hélice calée (finesse 12.4).
Une observation qui a aussi son importance, avec ou sans carburant, à la vitesse de 135 km/h,, l'hélice tourne pratiquement à la même vitesse. Pendant la descente et grâce à la vidéo, j'ai noté 1360 tpm à 7500 ft, 1260 à 6500 ft et 1220 tpm à 6000. Je pense que pendant la descente, comme la densité de l'air augmente, le couple résistant moteur augmente parce que les compressions sont plus importantes. Si on faisait tourner un moteur dans le vide, il n'existerait plus que les frottements mécaniques pour freiner sa rotation. Le couple d'entrainement hélice est lui constant à IAS constante. Avec du carburant et manette toujours au ralenti, le moteur ne prend qu'un petit 20 tours de plus, qui doit quand même avoir son importance pour amener la finesse ralenti à 14.
Le fils Julien m'a soufflé une idée pour rechercher le régime moteur de transparence hélice. On peut géométriquement calculer le régime qui conduit la pale à une incidence de portance nulle en fonction de la vitesse vraie. Pas sûr que cette conjonction soit possible en même temps sur toute la longueur de la pale, car il faudrait que le pas évolue linéairement en envergure (la vitesse circonférentielle est proportionnelle au rayon). La partie de la pale là plus impliquée pour l'aspect frein/traction est bien sûr l'extrémité qui tourne plus vite. mais ça vaut le coup d'essayer. Prochainement, je mesurerai le pas réel hélice à différents endroits de la pale et je verrai ce qu'on peut en tirer.
16 février.
Analyse de la vidéo moteur arrêté.
La vidéo c'est génial pour regarder les choses qu'on ne surveillait pas dans l'action, et j'ai remarqué une chose que je ne soupçonnais pas. Lors de notre plané moteur arrêté, mais hélice tournante, le régime moteur a changé progressivement à mesure que l'altitude diminuait. A 7500 ft il était de 1360 tpm, puis 1260 à 6500 ft et 1220 à 6000 ft.
Je me suis un peu gratté la tête, mais je pense avoir trouvé la raison. Le régime est le point d'équilibre entre le couple fourni par l'hélice grâce au vent relatif et le couple résistant moteur principalement dû au passage des compressions. Il existe un régime où ces deux couples sont égaux mais de signe opposé.
La force, et donc le couple hélice, ne varie pas pendant la descente qui s'effectue à IAS constante. C'est d'ailleurs pour cela qu'on pilote un avion à l'IAS, cela garantit la même réponse aux commandes de vol, la même vitesse de décrochage et donc les mêmes forces générées sur la structure quelle que soit l'altitude. On vole en réalité à pression dynamique constante pendant ce plané. Cela concerne donc également l'hélice.

La question est donc, pourquoi le couple résistant moteur augmente quand l'altitude diminue ?
La réponse est finalement toute simple. Quand l'altitude diminue, la pression statique de l'air augmente et le moteur admet plus d'air dans les cylindres en phase d'admission. L'air est élastique et donc les détentes compensent les compressions dans la partie du cycle où les soupapes sont fermées. Les pertes en absorption d'énergie sur l'arbre moteur sont à l'inverse importantes à l'ouverture des soupapes, lieu de grosses turbulences. Il est aisé de voir que plus la densité de l'air est importante, plus la perte d'énergie l'est aussi. Si l'on pouvait faire tourner le moteur dans le vide, il ne resterait que les frottements mécaniques pour offrir un couple résistant.
Bon, tout cela est bien joli pour la culture générale, mais que peut-on en tirer ?
On peut en déduire que le régime de transparence à 135 km/h est supérieur à 1360 tpm, valeur maxi enregistrée sur cet essai.
On peut également déduire que le freinage augmente quand l'altitude diminue et que donc la finesse avion avec moteur en panne se dégrade progressivement en s'approchant du sol, chose que je n'ai pas pu observer, mais que je ne cherchais pas non plus.
Le sujet n'est donc pas fermé et nous allons gratter encore un peu, d'autant que j'ai besoin pour mon modèle de SPEEDJOJO numérique de la finesse de l'avion sans hélice.
18 février.

Samedi est la journée réservée hangar pour les copains du RSA Côte d'Azur. Il sont plus là pour la discute que pour bosser, mais c'est bien sympa. J'ai donc insisté auprès du père pour qu'il se lève tôt un samedi matin afin d'avoir le temps d'un petit vol après ultime réglage de la palette de décrochage. Je rappelle que l'objectif est d'avoir une alarme qui sonne un peu en-dessous de 1.2 Vs en configuration approche. Le test effectué dans la foulée nous a donné 1.18 Vs, donc je valide à la peinture avec des repères pour retrouver facilement la bonne position en cas de démontage futur.
Voici les vitesses caractéristiques du SPEEDJOJO
Vitesses décrochage à 650 kg moteur réduit 18FEV23 :
Fuel 25 kg, deux à bord 158 kg
Calibration Xtrem +121 qui est réputé juste. Le badin aiguille est pessimiste de 5 km/h dans cette plage, mais c'est pourtant l'instrument de référence pour le pilotage en approche.
Première mesure après 2ème réglage palette de décrochage.
|
650 KG |
Alarme Vi badin |
Buffeting Vi badin |
Xtrem 121 % |
1,3 Vs badin |
1,2 Vs badin |
|
Vs0 |
91 |
78 |
83 |
104 |
96 |
|
Vs1 |
87 |
74 |
79 |
99 |
91 |
|
Vs2 |
84 |
71 |
76 |
95 |
87 |
|
Vs3 |
83 |
70 |
75 |
94 |
86 |
|
Vs4 |
83 |
70 |
75 |
94 |
86 |
Pour élaborer les valeurs 1,3 et 1,2 Vs :
ex : Vso Xtrem = 83 puis 1,3x83= 108
puis 108 Xtrem = 104 badin selon tableau de correspondance plus haut.
Vérifié avec la vidéo (vu à la télé :).
Ramené à 700 kg (masse montagne)
|
700 KG |
Alarme Vi badin |
Buffeting Vi badin |
Xtrem 121 % |
1,3 Vs badin |
1,2 Vs badin |
|
Vs0 |
95 |
81 |
86 |
107 |
99 |
|
Vs1 |
90 |
77 |
82 |
102 |
94 |
|
Vs2 |
87 |
74 |
79 |
98 |
90 |
|
Vs3 |
86 |
73 |
78 |
97 |
89 |
|
Vs4 |
86 |
73 |
78 |
97 |
89 |
Ce qui veut dire qu'à 1,2 Vs, le gueulard ne gueule plus.
Tableau à 780 kg (MMDEC)
|
780 KG |
Alarme Vi badin |
Buffeting Vi badin |
Xtrem 121 % |
1,3 Vs badin |
1,2 Vs badin |
|
Vs0 |
100 |
85 |
90 |
113 |
104 |
|
Vs1 |
95 |
81 |
86 |
108 |
99 |
|
Vs2 |
92 |
78 |
83 |
104 |
96 |
|
Vs3 |
91 |
77 |
82 |
103 |
95 |
|
Vs4 |
91 |
77 |
82 |
103 |
95 |
Conclusion
En approche « atterrissage court » à 1,2 Vs et masse montagne, il existe une marge de 3 km/h entre la Vapp et l'alarme, rendant cette dernière crédible.
La marge entre l'alarme et le buffeting est encore de 13 km/h.
En approche montagne sans majoration (nombres surlignés en vert), la vitesse d'approche lue au badin aiguille est de 90 km/h (95 réel), l'alarme sonne à 87 km/h (91 réel) et le buffeting apparait à 74 km/h (80 réel).
Mesure du calage hélice.
Effectuée promptement grâce à une appli du portable paternel qui mesure les angles.
L'hélice fait 1,85 m de diamètre (2 x 92,5).
Nous effectuons des mesures de l'angle entre le disque hélice et le calage local pour différentes positions. Ces positions sont à 20, 30, 40 et 72 cm du bout de pale avec donc respectivement le rayon 72.5, 62.5, 52.5 et 19.5 cm.
Le calage est mesuré par rapport à l'intrados du profil creux, il faut donc ajouter l'incidence de portance nulle que l'on approximera.
|
dist bout de pale |
Rayon local |
Angle intrados |
Angle utile +7° |
|
0,2 |
0,725 |
14,5° |
21,5° |
|
0,3 |
0,625 |
16,5° |
23,5° |
|
0,4 |
0,525 |
20° |
27° |
|
0,72 |
0,195 |
43,5° |
50,5° |

Il est assez difficile d'approximer l'angle de portance nulle. Mes
recherches sur le net semblent indiquer pour ce type de profil creux un Io de – 7° (incidence de portance nulle), ce qui
conduit à un régime de transparence d'environ 1350 tpm à TAS 140 km/h (39 m/s).
Si j'avais retenu -3,5° ce régime deviendrait 1600 tpm. Cette méthode est donc aléatoire et il convient de pouvoir faire une vraie mesure, du déplacement du vilebrequin par exemple. Une réflexion à été conduite avec le père in situ. Il pense, compte tenu du très faible déplacement (autour de 4 dixièmes), utiliser un capteur analogique à effet Hall en regard de la platine avant. A suivre...
Wouah ! Très étonnant cet article du 6 février. Je dois avouer avoir un peu de mal à trouver le cheminement de pensées qui est soutendu. Je me demande si il n'était pas possible d'obtenir les mêmes résultats avec un "simple" GPS, le tachy et le "badin". Le nouvel instrument y a certainement contribué.
RépondreSupprimerSur la partie hélice décrochée, il y a certainement beaucoup de vrai, mais d'ici à mesurer de combien et l'effet sur la traction, ça ne doit pas être facile, même en supposant que le profil est un habituel Clark Y.
Bravo en tout cas. Réflexion passionnante et impressionnante
Bruno, merci de me faire ce retour. Malgré tous mes efforts je ne suis pas toujours très clair, hélas. Ces résultats ont été plus faciles à capter grâce à la corrélation fine que je peux faire entre la vidéo qui filme les instruments et l’enregistrement gps fourni par le Flysight. Dans le passé, on notait tout à la main avec des erreurs possibles. Je peux maintenant par exemple enregistrer les petits écarts d’altitude qui influencent l’accélération en palier pour pouvoir les corriger. Il était aussi impossible de noter la correspondance IAS/RPM en palier d’accélération tellement c’est dynamique. Donc pour nous, ce nouveau protocole nous apporte plus de précision et des archives solides.
SupprimerEn ce qui concerne la partie hélice décrochée, je ne peux pas dire précisément quelle longueur de la pale est décrochée et d’ailleurs c’est de peu d’importance dans ce que je recherche, mais je peux en mesurer les effets par la mesure d’accélération horizontale. Connaissant la puissance fournie (modèle moteur PA/RPM/T°) et l’accélération au même instant, je peux en déduire la traction et le rendement hélice. C’est cela qui m’intéresse.
Le modèle global que je construit fait apparaître toutes ces grandeurs, puissance, traction hélice, rendement de propulsion, de forme et global de l’hélice, IAS,TAS, Cx, Cz, accélération en palier, FF etc…
C’est un petit peu long à finaliser car je dois affiner certains coefficients pour que le modèle global corresponde bien et en toutes circonstances (masse,altitude, température) au réel, mais j’y suis quasiment. La première retombée de ce modèle est d’avoir mis en évidence ce que j’ignorais jusque là, c’est à dire les conditions pour obtenir la TAS max.
En tout cas ça me donne beaucoup de plaisir d’aller ainsi au fond des choses et c’est bien la l’essentiel 😄
Wouah ! Très étonnant cet article du 6 février. Je dois avouer avoir un peu de mal à trouver le cheminement de pensées qui est soutendu. Je me demande si il n'était pas possible d'obtenir les mêmes résultats avec un "simple" GPS, le tachy et le "badin". Le nouvel instrument y a certainement contribué.
RépondreSupprimerSur la partie hélice décrochée, il y a certainement beaucoup de vrai, mais d'ici à mesurer de combien et l'effet sur la traction, ça ne doit pas être facile, même en supposant que le profil est un habituel Clark Y.
Bravo en tout cas. Réflexion passionnante et impressionnante
Standing ovation !
RépondreSupprimerAprès cette très saine lecture occupant nos longues soirées d'hiver, doit-on aller jusqu'à penser que ces jeunes mais néanmoins valeureux héliciers sisteronais ont vu juste, à la fois sur les limites des formes existantes et mieux encore, sur la bonne manière de dépasser cette barrière du rendement ?
C'est décidé pour mon prochain voyage, j'opte pour Air France, en demandant un équipage aussi passionné que scientifique ! :o)
Merci ! je vais demander un partenariat à mon employeur :o)
SupprimerBonjour Fred. Ce que tu as écris ce mois ci m'a demandé plusieurs relectures. C'est très intéressant. Bien que nous n'ayons pas encore tes résultats, ça fait faire des progrès dans la compréhension Traction/trainées et donc de l'optimisation des performances d'un avion. Il y avait des choses pas très intuitives pour moi, genre la traction qui diminue avec la vitesse (pour une hélice à calage fixe), et cette histoire d'hélice décrochée qui me laisse assez perplexe. Il est vrai que le changement de pente Régime/vitesse à 160 km/h est difficilement attribuable à l'aile (en tout cas pas uniquement - et je n'aurais pas pensé au décrochage de l'hélice). Encore que, les incidences significativement différentes des parties trapézoidale versus rectangulaire pourraient créer des surprises.
RépondreSupprimerBelles réflexions !
Merci pour ce nouveau retour client 😊. Oui, ce n’est pas forcément facile à comprendre d’autant que la littérature sur le sujet est très mince. Moi je trouve la diminution de traction avec la vitesse plutôt intuitive quand on pense à l’incidence des pales. En effet, si on ne considère que le partie accrochée de la pale, avec un régime moteur qui varie assez peu pendant l’accélération au décollage, alors que la vitesse horizontale augmente, l’incidence diminue géométriquement et donc le Cz. La portance de la pale (traction) diminue donc dans la même proportion. Tu me répondras que la vitesse vue par la pale intervient également dans cette portance, mais en réalité très peu compte tenu de l’angle de presque 90° entre vitesse avion et vitesse circonferentielle de la pale. Donc dans cette phase d’accélération qu’est le décollage, la vitesse vue par la pale change plus par son orientation (incidence) que dans sa valeur absolue. C’est d’ailleurs pour cela qu’on a inventé l’hélice à pas variable.
RépondreSupprimerConcernant la réalité d’une partie décrochée de la pale, il suffit de pousser l’expérience aux limites. Par exemple, quand tu fais un point fixe, l’incidence de la partie de l’hélice proche de l’emplanture est largement supérieure à une vingtaine de degrés (fais une mesure du pas hélice à cet endroit), impossible pour les filets d’air de passer cette partie sans décrocher. La vitesse axiale des filets d’air n’est néanmoins pas nulle à cet endroit, elle est créée par entraînement visqueux des filets rapides qui passent par la partie accrochée de l’hélice, mais elle est faible et ne contribue que très peu à diminuer l’incidence dans ce lieu proche de l’axe hélice.
Je ne vois pas comment l’aile de l’avion pourrait interférer avec le fonctionnement hélice, par contre le fuselage le fait et nous l’avions mis en évidence. En particulier avec notre nouveau capot moteur plus long (rallonge d’arbre) et plus fin qui nous a fait perdre environ 50 tpm au décollage. L’explication proviendrait du fait que l’obstacle en arrière de l’hélice modifie le champ de vitesse à travers l’hélice et que le nouveau capot a conduit à ce que la partie accrochée de l’hélice soit plus importante, donc offrant un couple résistant plus important et un régime d’équilibre plus faible.
Voilà un sujet de dossier technique que je vais creuser, tellement il est important d’avoir les idées claires là-dessus. Merci Bruno.🙏
Bonjour Fred. Merci pour ces explications complémentaires. J'ai du mal m'exprimer ou alors j'ai une incompréhension. Je pensais (naïvement ?) que dans la courbe régime moteur / vitesse , comme il s'agissait de la vitesse de l'avion, l'ensemble des trainées étaient prendre en compte. Et que donc si il y avait une modification significative de la trainée aux alentours de 160 km/h la trainée induite y était peut être pour quelque chose. D'autant que cette trainée induite est en fait l'addition de la trainée induite de la partie rectangulaire et de celle de la partie trapézoidale, deux parties qui ont forcément des comportements significativement différents. Dans le modèle que je m'étais mis en tête, il y avait autant de chances que le changement brusque de la pente (régime/vitesse) soit dû à l'hélice qui n'est plus décrochée que les trainées globales du "planeur", donc surtout de l'aile.
RépondreSupprimerMais pour arriver à cette conclusion, tu as dû étudier les polaires et les incidences des deux parties de l'aile (ou bien le comportement global de l'aile - et je n'ai fait ni l'u ni l'autre) et tu as dû en conclure que çà ne venait que de l'hélice. En tout cas c'était une supposition de ma part. Désolé, car je ne voudrais pas donner l'impression que je coupe les hélices en 4... quelques soient leur allongement...
Mais non, pas de pb, il faut questionner. La réponse à ta première question est effectivement une incompréhension.
SupprimerLa courbe qui donne le régime moteur plein gaz en fonction de la vitesse est indépendante de la condition avion, qu'il soit lourd, léger, au sol etc... n'a aucune importance. Le moteur est aveugle de l'avion et ne voit que le couple résistant qu'on lui oppose. Et ce couple résistant est fourni pas l'hélice qui brasse de l'air. Or, plus cet air est en mouvement, plus l'hélice tourne facilement et devra tourner plus vite pour fournir le même couple résistant au moteur. On peut donc associer un régime moteur à une vitesse avion, avec le moteur plein gaz évidemment. Le moteur pourrait être installé sur une voiture à hélice, c'est pareil. Le changement de pente n'est dû qu'à la géométrie hélice.
Ça se complexifie un peu avec le paramètre altitude qui nous fait dessiner une courbe RPM= f(IAS) par altitude, reflétant la baisse de puissance de moteur quand on grimpe. J'espère avoir été clair et bonne soirée.
Fred
Que de travail!
RépondreSupprimerJe partage qq reflexions.
- pour votre analyse sur la vitesse max, finalement ce serait plus simple avec une helice a pas variable! (ou en mettant un pas fixe plus important... ce qui a bcp de conséquences negatives par ailleurs)
- pour les volets de capots, entre le fuel-flow et la variation de vitesse, fermer les volets fait gagner 8-10% de trainée. C est considerable!
- sur la finesse moteur coupé, votre resultat montrant que caler le moteur diminue la finesse a pour conséquence pratique qu il ne faut pas tenter cette maneuvre delicate en cas de vraie panne moteur.
Je suis d’accord sur tout, quoique peut être un brin optimiste sur le gain de traînée. Je vais me pencher là dessus maintenant qu’on a des chiffres. Merci pour le commentaire
SupprimerSi on reprend la mesure effectuée au FL80, la traction hélice est quasi constante sur la plage de vitesse 232-237 km/h, ce qui veut dire que la traînée est la même pour le cas 232,2 km/h volet ouvert et le cas 237,9 km/h volet fermé (la vitesse influence la traînée au carré). Or cette égalité n’est possible que si le Cx global diminue de 5% avec le volet fermé. On peut aussi écrire qu’à la même vitesse, la traînée diminue de 5%. Donc je pinaille, mais c’est important pour moi de ne pas être approximatif dans les énoncés.
SupprimerConcernant le differentiel de trainee apportee par les capots de volet, je calculerais différemment.
RépondreSupprimerLa puissance moteur est proportionelle au Fuel Flow (mixturé), et au produit Cx x V3. (et également a Pa x Regime moteur).
A partir de vos 2 releves cela donne des gains de 6% (via les regime au FL80 plein gaz), 7.5% (via les FF au FL80) et 15% (FF au FL75).
Comme vous l indiquez poétiquement, votre debimetre n est peut-être pas d une precision absolue.
Mais peut etre pourriez vous multiplier les points de mesures, en particulier en vitesse de croisière, pour avoir des données plus consistantes. Pour la science!
Entièrement d’accord et aussi sur le fait que j’ai une confiance toute modérée dans le FF. Nous ferons d’autres mesures, soit dans les mêmes conditions, c’est à dire plein pot au dessus du FL80, soit à iso vitesse en notant PA et RPM qui sont très précises. Si les données convergent on sera à peu près sûr de la baisse de Cx. Pour la science bien sûr !
Supprimer